No edit summary |
m (Format) |
||
| Line 10: | Line 10: | ||
==Units== |
==Units== |
||
| − | Torque has dimensions of force times [[distance]] and the [[SI]] units of torque are stated as "[[newton]]-[[metre]]s". Even though the order of "newton" and "metre" are mathematically interchangeable, the BIPM ([[Bureau International des Poids et Mesures]]) specifies that the order should be N•m not m•N[http://www1.bipm.org/en/si/derived_units/2-2-2.html]. |
+ | Torque has dimensions of force times [[distance]] and the [[SI]] units of torque are stated as "[[newton]]-[[metre]]s". Even though the order of "newton" and "metre" are mathematically interchangeable, the BIPM ([[Bureau International des Poids et Mesures]]) specifies that the order should be N•m not m•N [http://www1.bipm.org/en/si/derived_units/2-2-2.html]. |
The [[joule]], the SI unit for [[energy]] or [[mechanical work|work]], is also defined as 1 N•m, but this unit is not used for torque. Since energy can be thought of as the result of "force dot distance", energy is always a scalar whereas torque is "force cross distance" and so is a [[pseudovector|(pseudo) vector]]-valued quantity. Of course, the dimensional equivalence of these units is not simply a coincidence; a torque of 1 N·m applied through a full revolution will require an [[energy]] of exactly 2π joules. Mathematically, |
The [[joule]], the SI unit for [[energy]] or [[mechanical work|work]], is also defined as 1 N•m, but this unit is not used for torque. Since energy can be thought of as the result of "force dot distance", energy is always a scalar whereas torque is "force cross distance" and so is a [[pseudovector|(pseudo) vector]]-valued quantity. Of course, the dimensional equivalence of these units is not simply a coincidence; a torque of 1 N·m applied through a full revolution will require an [[energy]] of exactly 2π joules. Mathematically, |
||
| Line 109: | Line 109: | ||
:<math>\mbox{Power}=\mbox{torque} \times 2 \pi \times \mbox{rotational speed} </math> |
:<math>\mbox{Power}=\mbox{torque} \times 2 \pi \times \mbox{rotational speed} </math> |
||
| − | In order to move large amounts of load, torque is essential. The larger the gear ratio the more torque will be produced. this will decrease speed, but speed is unimoprtant when it comes to large loads. If torque is in lbf•ft and rotational speed in revolutions per minute, the above equation gives power in ft•lbf/min. The horsepower form of the equation is then derived by applying the conversion factor 33,000 |
+ | In order to move large amounts of load, torque is essential. The larger the gear ratio the more torque will be produced. this will decrease speed, but speed is unimoprtant when it comes to large loads. If torque is in lbf•ft and rotational speed in revolutions per minute, the above equation gives power in ft•lbf/min. The horsepower form of the equation is then derived by applying the conversion factor 33,000 ft•lbf/min per horsepower: |
:<math>\mbox{power}=\mbox{torque} \times 2 \pi \times \mbox{rotational speed} \frac{\mbox{ft}\cdot\mbox{lbf}}{\mbox{min}} \times \frac{\mbox{horsepower}}{33,000 \frac{\mbox{ft}\cdot\mbox{lbf}}{\mbox{min}} } = \frac {\mbox{torque} \times \mbox{RPM}}{5252} </math> |
:<math>\mbox{power}=\mbox{torque} \times 2 \pi \times \mbox{rotational speed} \frac{\mbox{ft}\cdot\mbox{lbf}}{\mbox{min}} \times \frac{\mbox{horsepower}}{33,000 \frac{\mbox{ft}\cdot\mbox{lbf}}{\mbox{min}} } = \frac {\mbox{torque} \times \mbox{RPM}}{5252} </math> |
||
Revision as of 23:30, 3 December 2017
In physics, torque can be thought of informally as "rotational force". Torque is measured in units of newton metres, and its symbol is τ. The concept of torque, also called moment or couple, originated with the work of Archimedes on levers. The rotational analogues of force, mass and acceleration are torque, moment of inertia and angular acceleration respectively. The force applied to a lever, multiplied by its distance from the lever's fulcrum, is the torque. For example, a force of three newtons applied two metres from the fulcrum exerts the same torque as one newton applied six metres from the fulcrum. This assumes the force is in a direction at right angles to the straight lever. More generally, one may define torque as the cross product:

where
F is the vector of force.
r is the vector from the axis of rotation to the point on which the force is acting.
Units
Torque has dimensions of force times distance and the SI units of torque are stated as "newton-metres". Even though the order of "newton" and "metre" are mathematically interchangeable, the BIPM (Bureau International des Poids et Mesures) specifies that the order should be N•m not m•N [1].
The joule, the SI unit for energy or work, is also defined as 1 N•m, but this unit is not used for torque. Since energy can be thought of as the result of "force dot distance", energy is always a scalar whereas torque is "force cross distance" and so is a (pseudo) vector-valued quantity. Of course, the dimensional equivalence of these units is not simply a coincidence; a torque of 1 N·m applied through a full revolution will require an energy of exactly 2π joules. Mathematically,

where
E is the energy
τ is torque
θ is the angle moved, in radians.
Other non-SI units of torque include "pound-force-feet" or "foot-pounds-force" or "ounce-force-inches or meter-kilograms-force.
Special cases and other facts
Moment arm formula
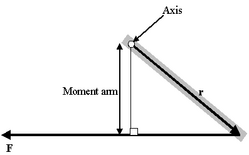
Moment arm diagram
A very useful special case, often given as the definition of torque in fields other than physics, is as follows:

The construction of the "moment arm" is shown in the figure below, along with the vectors r and F mentioned above. The problem with this definition is that it does not give the direction of the torque but only the magnitude, and hence it is difficult to use in three-dimensional cases. If the force is perpendicular to the displacement vector r, the moment arm will be equal to the distance to the centre, and torque will be a maximum for the given force. The equation for the magnitude of a torque arising from a perpendicular force:

For example, if a person places a force of 10 N on a spanner which is 0.5m long, the torque will be 5 N·m, assuming that the person pulls the spanner in the direction best suited to turning bolts.
Force at an angle
If a force of magnitude F is at an angle θ from the displacement arm of length r (and within the plane perpendicular to the rotation axis), then from the definition of cross product, the magnitude of the torque arising is:

Static equilibrium
For an object to be at static equilibrium, not only must the sum of the forces be zero, but also the sum of the torques (moments) about any point. For a two-dimensional situation with horizontal and vertical forces, the sum of the forces requirement is two equations: ΣH = 0 and ΣV = 0, and the torque a third equation: Στ = 0. That is, to solve statically determinate equilibrium problems in two-dimensions, we use three equations.
Torque as a function of time
Torque is the time-derivative of angular momentum, just as force is the time derivative of linear momentum. For multiple torques acting simultaneously:

where L is angular momentum.
Angular momentum on a rigid body can be written in terms of its moment of inertia and its angular velocity :



so if is constant,

where α is angular acceleration, a quantity usually measured in rad/s²
Machine torque
Torque is part of the basic specification of an engine: the power output of an engine is expressed as its torque multiplied by its rotational speed. Internal-combustion engines produce useful torque only over a limited range of rotational speeds (typically from around 1,000–6,000 rpm for a small car). The varying torque output over that range can be measured with a dynamometer, and shown as a torque curve. The peak of that torque curve usually occurs somewhat below the overall power peak. The torque peak cannot, by definition, appear at higher rpm than the power peak.
Understanding the relationship between torque, power and engine speed is vital in automotive engineering, concerned as it is with transmitting power from the engine through the drive train to the wheels. The gearing of the drive train must be chosen appropriately to make the most of the motor's torque characteristics.
Steam engines and electric motors tend to produce maximum torque at or around zero rpm, with the torque diminishing as rotational speed rises (due to increasing friction and other constraints). Therefore, these types of engines usually have quite different types of drivetrains from internal combustion engines.
Torque is also the easiest way to explain mechanical advantage in just about every simple machine.
Relationship between torque and power
If a force is allowed to act through a distance, it is doing mechanical work. Similarly, if torque is allowed to act through a rotational distance, it is doing work. Power is the work per unit time. However, time and rotational distance are related by the angular speed where each revolution results in the circumference of the circle being travelled by the force that is generating the torque. This means that torque that is causing the angular speed to increase is doing work and the generated power may be calculated as:

Mathematically, the equation may be rearranged to compute torque for a given power output. However in practice there is no direct way to measure power whereas torque and angular speed can be measured directly.
Consistent units must be used. For metric SI units power is watts, torque is newton-metres and angular speed is radians per second (not rpm and not even revolutions per second).
Conversion to other units
For different units of power, torque or angular speed, a conversion factor must be inserted into the equation. For example, if the angular speed is measured in revolutions instead of radians, a conversion factor of must be added because there are radians in a revolution:

- , where rotational speed is in revolutions per unit time

Some people (e.g. American automotive engineers) use horsepower (imperial mechanical) for power, foot-pounds (lbf•ft) for torque and rpm's (revolutions per minute) for angular speed. This results in the formula changing to:

This conversion factor is approximate because the transcendental number π appears in it; a more precise value is 5252.113 122 032 55... It also changes with the definition of the horsepower, of course; for example, using the metric horsepower, it becomes ~5180.
Use of other units (e.g. BTU/h for power) would require a different custom conversion factor.
Derivation
For a rotating object, the linear distance covered at the circumference in a radian of rotation is the product of the radius with the angular speed. That is: linear speed = radius x angular speed. By definition, linear distance=linear speed x time=radius x angular speed x time.
By the definition of torque: torque=force x radius. We can rearrange this to determine force=torque/radius. These two values can be substituted into the definition of power:

The radius r and time t have dropped out of the equation. However angular speed must be in radians, by the assumed direct relationship between linear speed and angular speed at the beginning of the derivation. If the rotational speed is measured in revolutions per unit of time, the linear speed and distance are increased proportionately by in the above derivation to give:
In order to move large amounts of load, torque is essential. The larger the gear ratio the more torque will be produced. this will decrease speed, but speed is unimoprtant when it comes to large loads. If torque is in lbf•ft and rotational speed in revolutions per minute, the above equation gives power in ft•lbf/min. The horsepower form of the equation is then derived by applying the conversion factor 33,000 ft•lbf/min per horsepower:

Because .

{kind=link}
See also
| This page uses Creative Commons Licensed content from Wikipedia (view authors). | 
|
References
- Serway, Raymond A.; Jewett, John W. (2004) Physics for Scientists and Engineers (6th ed.), Brooks/Cole. ISBN 0534408427
- Tipler, Paul (2004) Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics (5th ed.), W. H. Freeman. ISBN 0716708094